The basic n-dimensional ODE equation
where  is the independent variable,
is the independent variable,  are the dependent variable, and underlines denote vectors.
are the dependent variable, and underlines denote vectors.
This looks like a first-order ODE, but it can represent a higher
order ODE with a simple "chain" of variables. E.g.,
 can be implemented by defining
can be implemented by defining  , and
, and
We can also eliminate explicit dependence by making it one of the
elements of .
Note: I'm going to drop the underlines now, but  and
and  are still vectors.
are still vectors.
Numerical solutions
- We want to find approximate numeric solutions of some accuracy without already knowing the analytic solution.
- For initial value problems, we do this by integrating the ODE in
discrete steps in . The step size is conventionally called
 .
. - The easiest starting point is the Taylor series.
Euler 1st order:


2nd order


*** If we require that only the function be specified
in analytic form, not its derivatives, then  has to be estimated from
previous or future values of in some clever way.
has to be estimated from
previous or future values of in some clever way.
Heun's method: 2nd order

where  is the
Euler's method approximation for
is the
Euler's method approximation for  .
.
This is equivalent to

Fourth-order Runge-Kutta

where




An API for an ODE solver
The API can be very simple: just one function to advance one step.
The ODE step function takes three arguments:
- The starting value of . (A vector<double>.)
- The function for . (A pointer to a function.)
- The size of the step .
There are two options for how to return the updated value:
- Actually return the new value.
- Update the existing "in place" (pass by reference).
The function takes a little more thought.
Test case: oscillators and orbits
We know the solutions to and to
 .
Let's test the Euler ODE solver with that case.
.
Let's test the Euler ODE solver with that case.
Code: see course web page.
Results of test
Position vs time:
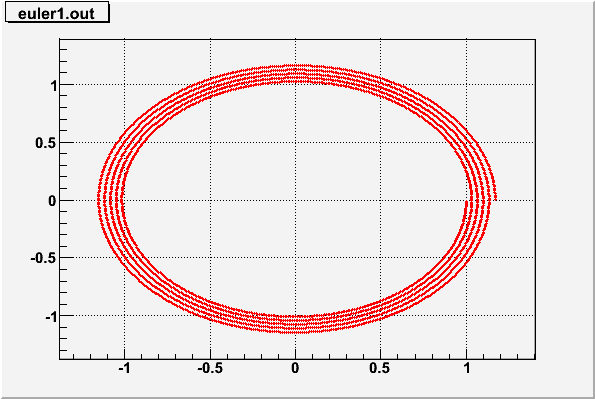
Results of the test program for Euler integration of the simple harmonic oscillator equation. Note how points spiral out.
It's spiralling outward. Energy is not being conserved!
What went wrong?
Momentarily using the underline notation again, the vector
 is a vector in phase space.
It is supposed to follow a closed path, but the finite steps in the
1-st order Euler ODE solver don't allow that.
is a vector in phase space.
It is supposed to follow a closed path, but the finite steps in the
1-st order Euler ODE solver don't allow that.
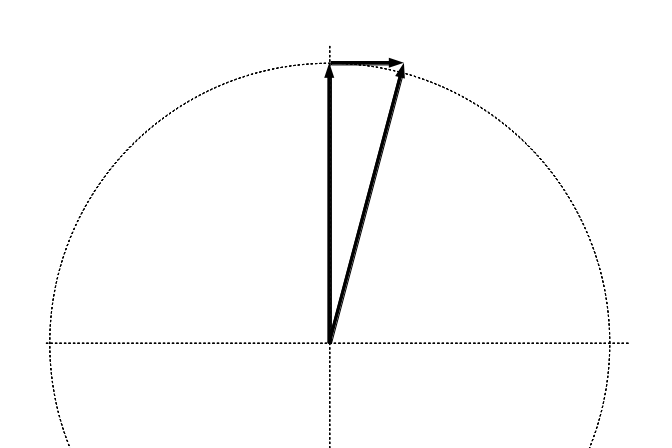
Addition of a finite correction perpendicular to a vector.
Symplectic ODEs
The harmonic oscillator and orbit problems, and many others in science in engineering, are examples of solutions of Hamiltonian equations:
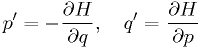
The solutions should conserve  . The Euler and Runge-Kutta schemes don't.
. The Euler and Runge-Kutta schemes don't.
Numerical symplectic ODE solvers
The simplest (and very common) cases arise from  , so that
, so that
 and
and  .
.
A 1st-order symplectic version of Euler's equation:


A beautiful 2nd-order symplectic method:



Note these symplectic methods need to distinguish between  and
and  .
.